
August 13, 2020
By Brianne Christopher
Categoria: Pubblicazioni

International Conference on Robotics in Alpe-Adria Danube Region (06/2018)
Authors
Borboni, M. Serpelloni, M. Borghetti, C. Amici, F. Aggogeri, E. Sardini. R. Faglia Università degli Studi di Brescia
Fausti, M. Antonini, M. Mor Polibrixia srl
Abstract
Stroke patients are often affected by hemiparesis. In the rehabilitation of these patients the function of the hand is often neglected. Thus in this work we propose a robotic approach to the rehabilitation of the hand of a stroke patient in hospital and also at home. Some experimental results can be presented here especially for inpatients. Further experimental results on home-patients must be acquired through a telemedicine platform, designed for this application.

In book: New Trends in Medical and Service Robotics
Authors
- Ceresoli, F. Aggogeri, C. Amici, A. Borboni, R. Faglia, N. Pellegrini, M. Tiboni Università degli Studi di Brescia
- Antonini, D. Fausti, M. Mor, G. Petrogalli, A. Vertuan Polibrixia srl
Abstarct
This work proposes a new device for lower and upper limb rehabilitation. The device is portable and modular and can be adopted to realize different system configurations and to perform different exercises. A design description and an analysis are shown, a working prototype is under construction and tests on humans are planned.

International Conference on Mechatronics Technology (ICMT) (10-2019)
C. Amici, M. Ghidoni , F. Ceresoli, F. Ragni, M. Tiboni University of Brescia, Brescia, Italy
P. Gaffurini, L. Bissolotti Domus Salutis Rehabilitation Clinic, Teresa Camplani Foundation
M. Mor, D. Fausti, M. Antonini Polibrixia s.r.l., Brescia, Italy
Abstract:
Objective: Robotic devices are commonly used in rehabilitation as support to physiotherapists in their daily rehabilitation activities, since they can monitor and quantify the subject’s performance and deliver feedback, as well as supply physical therapy. This work aims at performing a preliminary validation of an innovative device, developed within the SIMeRiON funded project, and identifying the optimal experimental setup for the clinical trials, through the analysis of the characteristics of a planar reaching movement impressed to the upper limb of the subject in a sequence of repetitions. Methods: A male healthy subject (26 years old) has been recruited, and asked to perform an imposed reaching movement with his left arm, during three consecutive sessions. The subject was instrumented with two triaxial accelerometers, placed in two possible configurations, and eight passive optical markers evaluated with a two fixed cameras optoelectronic system. To identify and compare different motion cycles, the collected data have been analyzed in MATLAB and R environment. Results: Data emphasize a high repeatability of the imposed movement, especially at human-machine interface, and suggest that accelerometers data could be integrated with different sensors (e.g. sEMG sensors).
International Journal of Materials and Product Technology 60(1):18 (01-2020)
Abstract
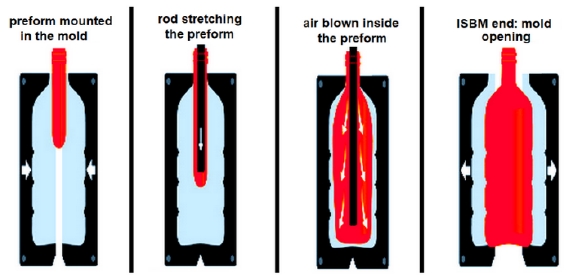
Polyethylene terephthalate (PET) is a widely used polymer in the production of bottles by injection stretch blow moulding (ISBM). In this work, we present a characterisation method to identify material properties directly from a preform, considering temperature and stress-relaxation effects related to its viscoelastic response. A customised oven and gripping system were designed to perform uniaxial tests in a proper temperature range on tubular specimens obtained from preforms. A visco-hyperelastic model is then proposed: a Marlow-type strain energy function coupled with a Prony series and William-Landel-Ferry equation to include time and temperature dependency. Finally, a case study of ISBM process is implemented in a finite element code considering this constitutive model. Strain maps and predicted thickness of the bottle wall were evaluated as process quality indicators. Simulation results showed good agreement with measurements on the real processed bottle, confirming the usefulness of the approach for product or process parameters optimisation.
M. Antonini [1], D. Fausti [1], M. Mor [1],
[1] PoliBrixia s.r.l., Brescia, Italy
In questo documento, viene analizzato “l’effetto Morton”. Questo fenomeno è un tipo particolare di instabilità del rotore dovuta al riscaldamento del cuscinetto di banco non uniforme. In questo documento è stata fatta una panoramica dei lavori precedenti. Dopo questo studio preliminare, è stato scelto e analizzato un approccio specifico suggerito dalla letteratura. Un modello termico, un modello dinamico del rotore e un criterio di stabilità sono stati implementati con COMSOL®.

Progetto, realizzazione e sperimentazione di un sistema automatico per la riabilitazione del gomito.
Progetto, realizzazione e sperimentazione di un sistema automatico per la riabilitazione del gomito.
Il dispositivo si classifica come un sistema automatico adatto sia per una riabilitazione di tipo passivo, CPM, che attivo o cooperante con il paziente.
Sulla base dei risultati ottenuti dalle prove cliniche del dispositivo (esposte nell’articolo) sono stati definiti i requisiti funzionali per il controllo dello stesso. Il design degli algoritmi di controllo e la loro implementazione è in corso. La finalità è quella di dotare il fisioterapista di uno strumento che non solo replichi le tipologie di ginnastica oggi utilizzate, ma che permetta di sperimentarne di nuove e di quantificarne i risultati

Bando di invito a presentare progetti di ricerca industriale e sviluppo sperimentale nei settori strategici di Regione Lombardia e del MIUR.
Negli anni la ricerca ha portato allo sviluppo di dispositivi meccanici riabilitativi complementari al
trattamento tradizionale del fisioterapista che permettono di incrementare l’intensità e la qualità della riabilitazione. Uno degli ultimi nati è Gloreha Professional, un dispositivo ospedaliero per il trattamento della mano.
L’obiettivo di questo progetto è sviluppare un dispositivo/sistema di teleriabilitazione dell’arto superiore dedicato al paziente neurologico, focalizzato in particolare sul recupero dei movimenti della mano e del polso che sono fondamentali nello svolgimento delle attività della vita quotidiana: un “modulo” in grado in prospettiva di integrarsi in un più ampio e completo servizio di tele-gestione clinica del processo di cura domiciliare per patologie neurologiche.
Attività di ricerca svolta per SALERI-SIL Lumezzane (Brescia), in collaborazione con il Dipartimento di Ingegneria Meccanica e Industriale dell’Universtà di Brescia.
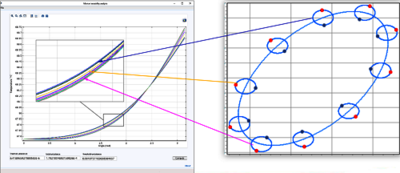
Il lavoro ha come primo obiettivo quello di individuare una metodologia matematica generale di sintesi dei profili della pompa gerotor. L’approccio classico permette di generare dei profili a partire da curve generatrici tipicamente circolari; si vuole estendere la metodologia a forme geometriche generalmente complesse descrivibili mediante curve di Bezier.
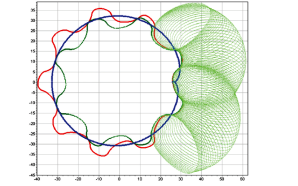
La generazione della procedura porta con sé una maggior flessibilità nella forma dei profili ottenuti e quindi una maggiore libertà di scelta del profilo che meglio rispetta le specifiche necessità a cui la pompa dovrà far fronte. Si vuol proporre a tal proposito una ricerca automatica della soluzione ottima. Le caratteristiche tipicamente richieste alla pompa sono:
– Ridotta rumorosità
– Usura contenuta
– Elevate efficienze
– Rispetto di determinate cilindrate e ingombri massimi.
Si intende proporre una metodologia di ottimizzazione del profilo, migliorando per quanto possibile le prestazioni indicate. Più nello specifico si intende utilizzare un algoritmo genetico per spostare i nodi della curva di Bezier del profilo generante per migliorare le prestazioni volute.
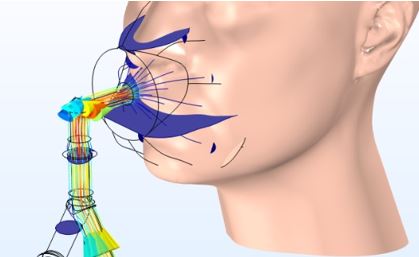
M. Mor [1], C. Seneci [1], V. Zacché [1], C. Remino [1], G. Petrogalli [1], D. Fausti [1], [1] Polibrixia, Brescia, Italia
Questo lavoro presenta lo studio e la progettazione di un forno di nuova generazione per macchine per soffiaggio di PET. Il progetto ha affrontato diverse sfide tecniche quali: la distribuzione della temperatura nelle aree critiche, il raggio di curvatura tagliente, l’elevata inerzia termica del PET e la presenza di elementi di contorno che hanno influito sulle prestazioni complessive. Il lavoro ha incluso un’analisi del materiale preforme e l’influenza della geometria sul processo di riscaldamento e trasformazione, seguita dalla definizione del modello da implementare nella simulazione. Infine una serie di simulazioni volte a simulare il sistema di riscaldamento a infrarossi e il sistema di raffreddamento convettivo, necessario per controllare il processo di riscaldamento, ottenendo la distribuzione ideale della temperatura, più efficienza, risparmio energetico e maggiore modularità.
