

Architettura a cinematica parallela, geometria riconfigurabile, motorizzazione a trasmissione differenziale, elevato rapporto rigidezza e leggerezza
Ambiti coinvolti
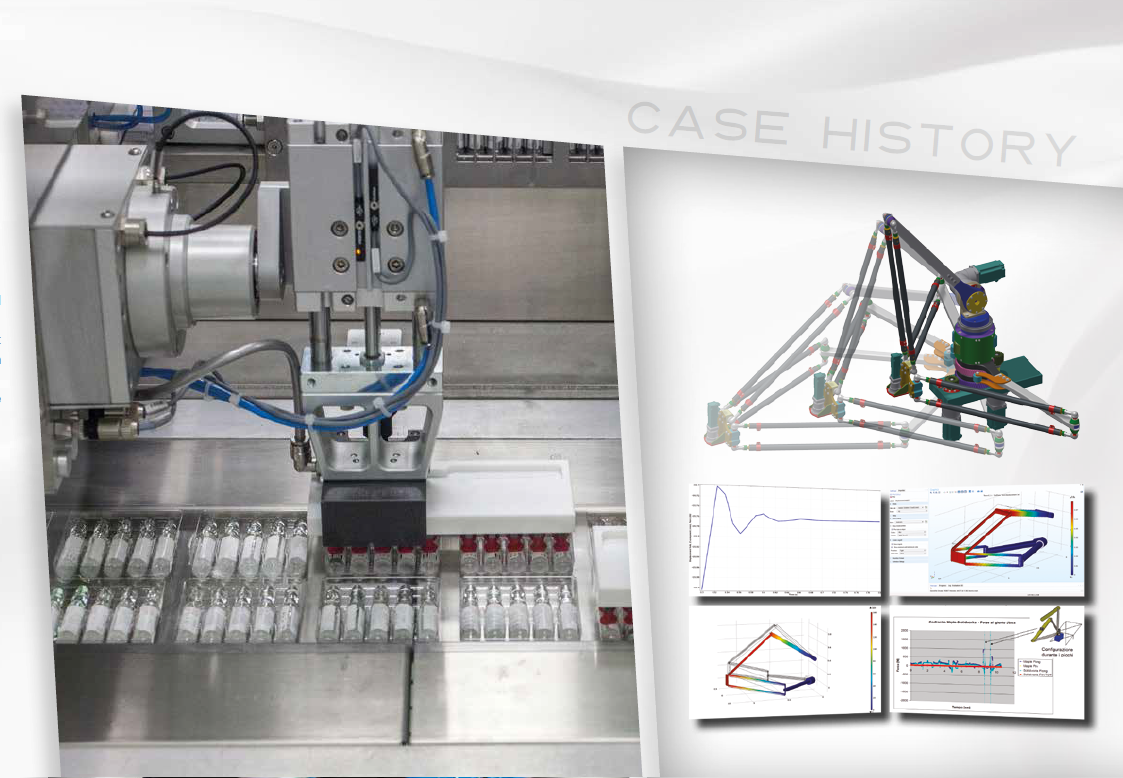
Dall’idea allo sviluppo mediante progettazione funzionale ed esecutiva. Risoluzione di cinematica e dinamica diretta ed inversa del robot mediante software di calcolo appositamente sviluppato e con simulazioni multibody.
Progettazione e modellazione CAD, dimensionamento e verifiche con metodi FEM.
Risultati ottenuti dal cliente
- Nuovo prodotto
- Possibilità utilizzo robot in ambiti operativi diversi
- Ottimizzazione layout di spostamento prodotto nelle linee.
- Sviluppo robot proprietario ad hoc
- Riduzione costi gestione
- Brevetto

